Anomaly Detection with Generative Adversarial Networks for Multivariate Time Series
本文最后更新于:2 年前
Introduction
这篇文章提出了一个基于GAN的时间序列异常检测模型。
Contribution
- 提出了基于GAN的时间序列无监督异常检测模型
- 我们使用基于LSTM的GAN来对多变量时间序列进行建模
- 结合使用了Residual Loss和Discrimination Loss来进行异常的判断
Background
Generative Adversarial Networks
GANs In a Nutshell, an extremely simple explanation
- 我们想要从一个复杂的、高维的数据分布\(p_r(x)\)上采样得到我们想要的数据点,然而\(p_r(x)\)无法直接求得
- 代替方法:从一个简单的、已知的分布\(p_z(z)\)上采样,然后学习一个Transformation \(G(z): z\rightarrow x\)来将\(z\)映射到\(x\)
Training: Two-player Game
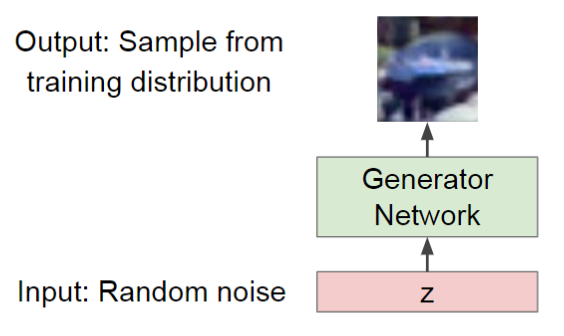
- Generator Network: 从随机分布\(p_z(z)\)采样\(z\),通过映射生成样本\(x\),这个生成的样本要尽量“真实”。怎么“真实”?优化生成器参数\(\theta_G\)最大化判别器对生成样本的评分即可
- Discriminator Network: 接受一个样本\(x\),判断其是生成的样本还是真实的样本。在训练阶段,我们是知道一个样本\(x\)到底是生成的还是真实的,所以优化判别器参数\(\theta_D\)最小化判别器对生成样本的评分,最大化对真实样本的评分(即最大化分辨真实样本的能力)
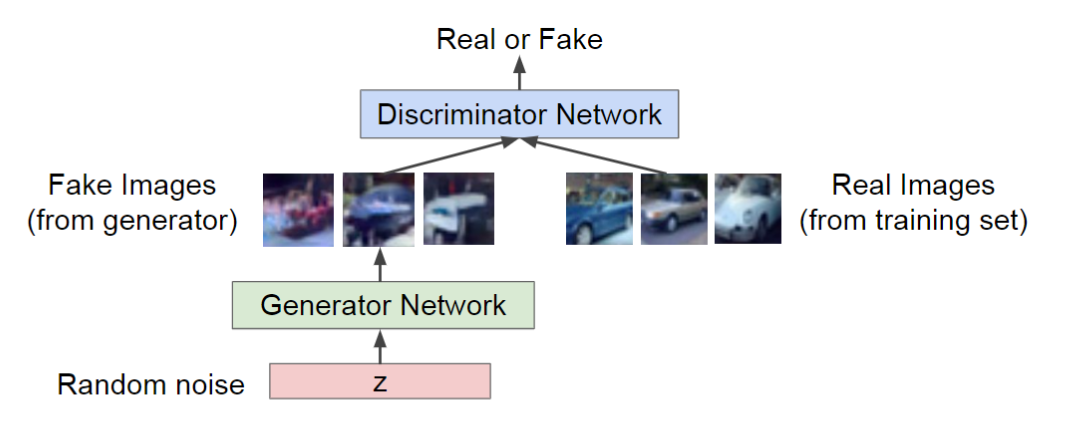
形式化的来讲,优化函数如下:
\[\min\limits_{\theta_G}\max\limits_{\theta_D}V(G,D)=\mathbb{E}_{x\sim p_{data}(x)\log(\underbrace{D_{\theta{D}}(x)}_{判别器对真实样本的评分})}+\mathbb{E}_{z\sim p_z(z)}\log(1-\underbrace{D_{\theta_d}(G_{\theta_G}(z))}_{判别器对生成样本的评分})\]
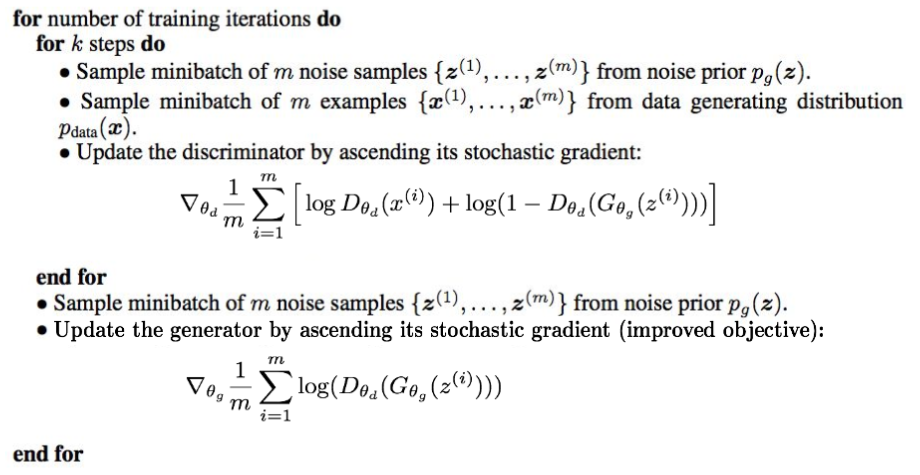
训练过程如下:
Long Short Time Memory Networks
Vanilla Recurrent Neural Networks
普通的神经网络:
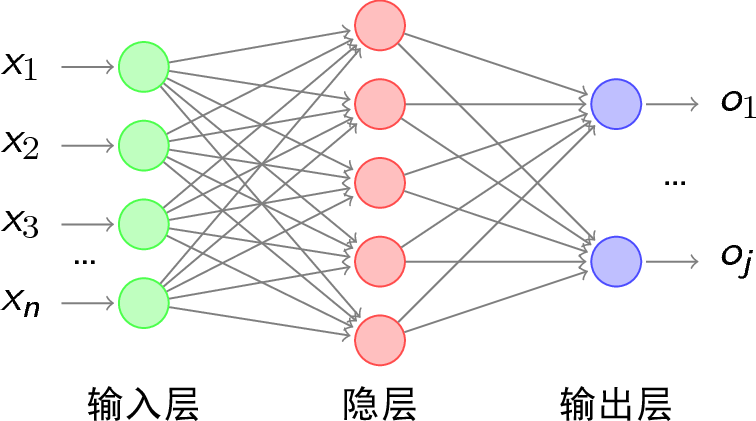
概括的来讲,可以涵盖为一个公式\(\hat{\mathbf{y}}=f(\mathbf{x})\)。对于一个样本\(\mathbf{x}\),通过多层神经网络映射,输出\(\mathbf{y}\)。
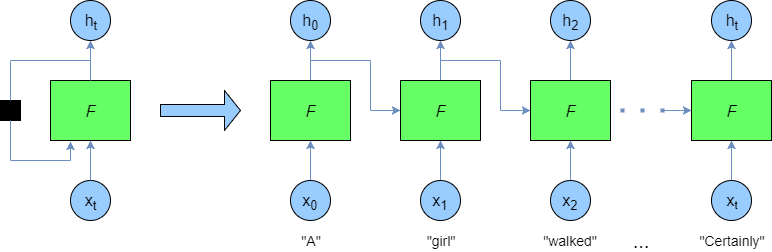
对于RNN,我们处理的是序列数据,也就是说所有样本之间并不是相互独立的。对于一个序列中的一个样本\(x_t\in\{x_1,x_2,\cdots,x_n\}\),将其输入到神经网络的时候,为了建模\(x_t\)之前的子序列对\(x_t\)的影响关系,需要将这个子序列的信息也输入到神经网络中,怎么做呢?为每一个样本点保存一个State。即定义\(h_t=g(\hat{y_t})=g(f(x_t))\),对于当前样本点,\(\hat{y_t}=f(x_t,h_{t-1})\)。也就是说神经网络的输入不仅包含了当前样本点的特征,也包含了上一个样本点的“状态”(上一个样本点的“状态”又隐含了上上个样本点的“状态”...),就像是为网络加上了短期记忆。
Gradient Flow of Vanilla RNN
下面来进行一些形式化的定义,假设在时刻\(t\)网络输入特征为\(x_t\),输出隐含状态为\(h_{t}\),其不仅和当前输入\(x_t\)有关,还和上一个隐含状态\(h_{t-1}\)有关:
- 当前时刻总的净输入\(z_t=Uh_{t-1}+Wx_t+b\)
- 当前时刻输出隐含状态\(h_t=f(z_t)\)
- 当前时刻输出\(\hat{y}_t=Vh_t\)
RNN的梯度更新公式(推导过程比较复杂):
\[\frac{\partial{\mathcal{L}}}{\partial U}=\sum\limits_{t=1}^T\sum\limits_{k=1}^t \delta_{t,k}\mathbf{h}_{k-1}^T\]
\[\frac{\partial{\mathcal{L}}}{\partial{W}}=\sum\limits_{t=1}^T\sum\limits_{k=1}^t \delta_{t,k}x_k^T\]
\[\frac{\partial\mathcal{L}}{\partial{b}}=\sum\limits_{t=1}^T\sum\limits_{k=1}^t\delta_{t,k}\]
其中\(\delta_{t,k}=\frac{\partial{\mathcal{L}}}{\partial{z_k}}=\text{diag}(f^\prime(z_k))U^T\delta_{t,k+1}\)定义为第\(t\)时刻的损失对第\(k\)时刻隐藏神经层的净输入\(z_k\)的导数,且\(z_k=Uh_{k-1}+Wx_k+b,1\leq k<t\)。
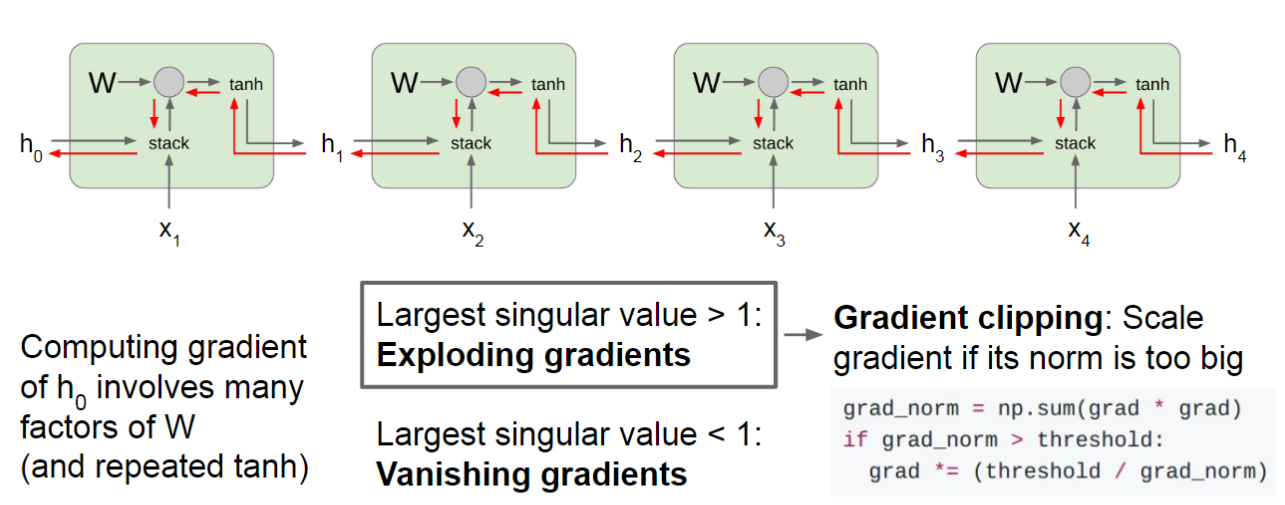
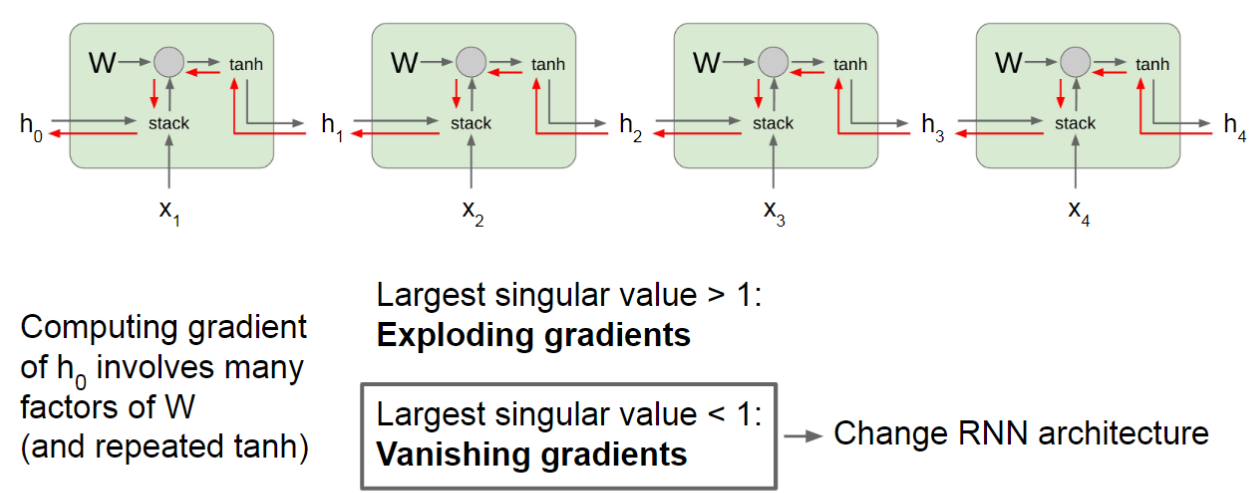
RNN的梯度流向如下图红箭头所示:
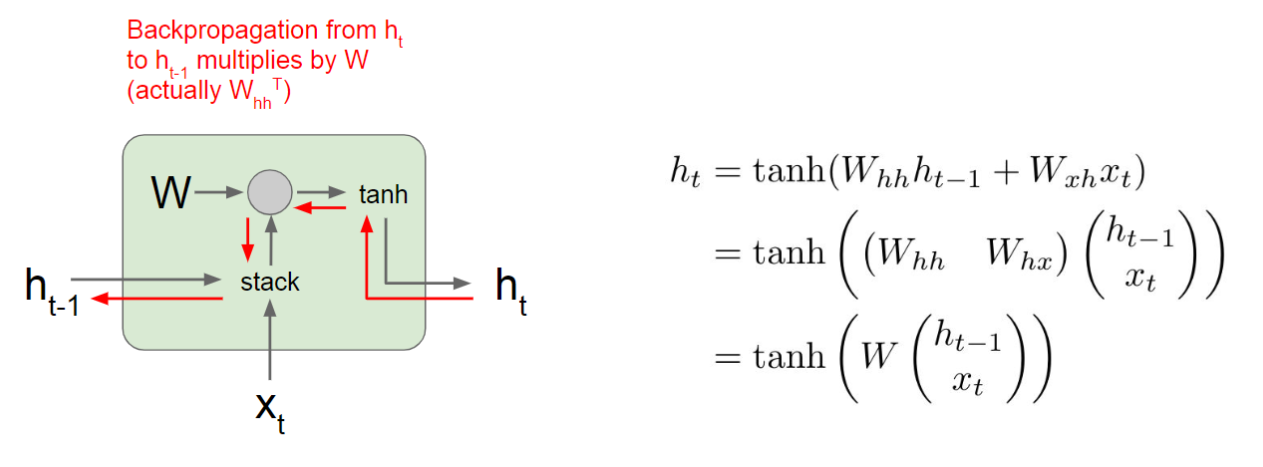
RNN会遇到梯度消失和梯度爆炸的问题。根据前面的公式,\(\delta_{t,k}\)实际上是递归定义的,展开得到:
\[\delta_{t,k}=\prod\limits_{\tau=k}^{t-1}(\text{diag}(f^\prime(z_\tau))U^T)\delta_{t,t}\]
如果定义\(\gamma\cong\parallel\text{diag}(f^\prime(z_\tau))U^T\parallel\),那么\(\delta_{t,k}\cong\gamma^{t-k}\delta_{t,t}\)。在\(t-k\)很大时,\(\gamma<1\)会导致梯度消失,\(\gamma>1\)时会导致梯度爆炸。
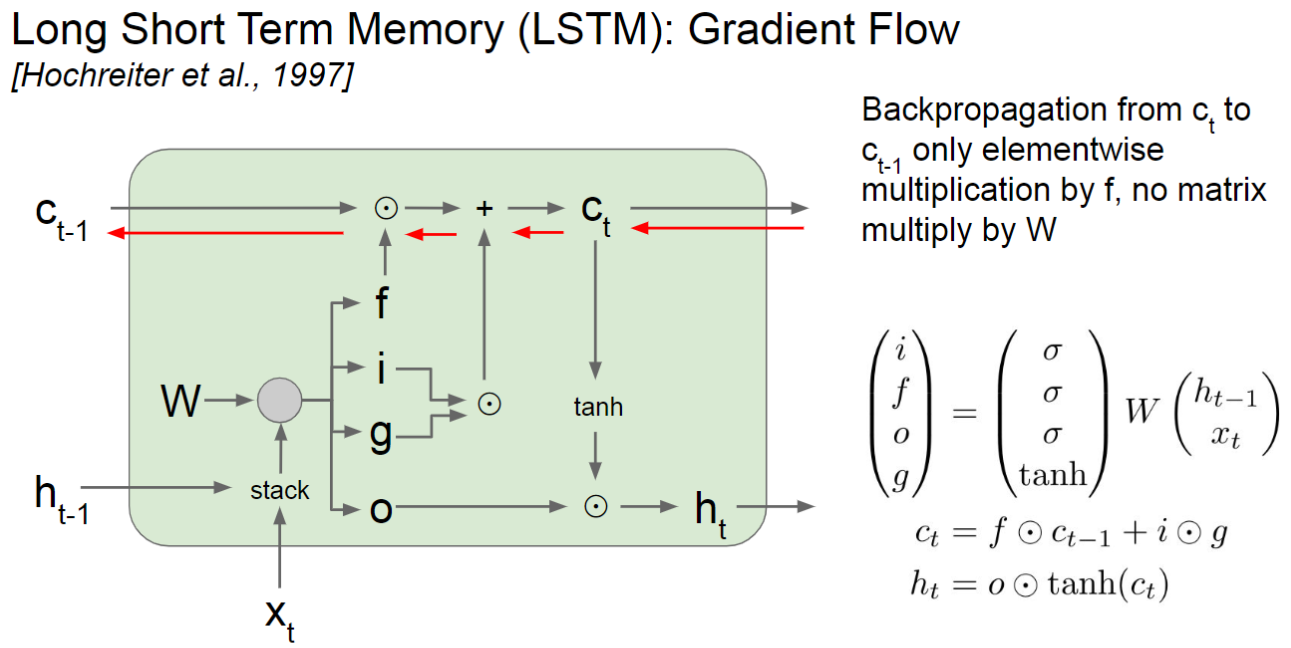
Long Short Time Memory
LSTM是一种解决RNN梯度消失问题的改进版本:
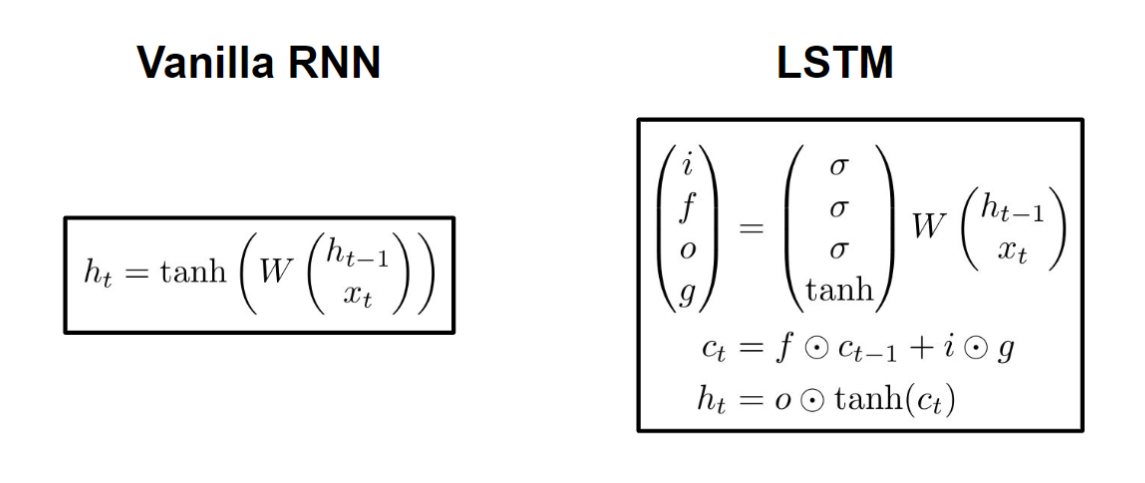
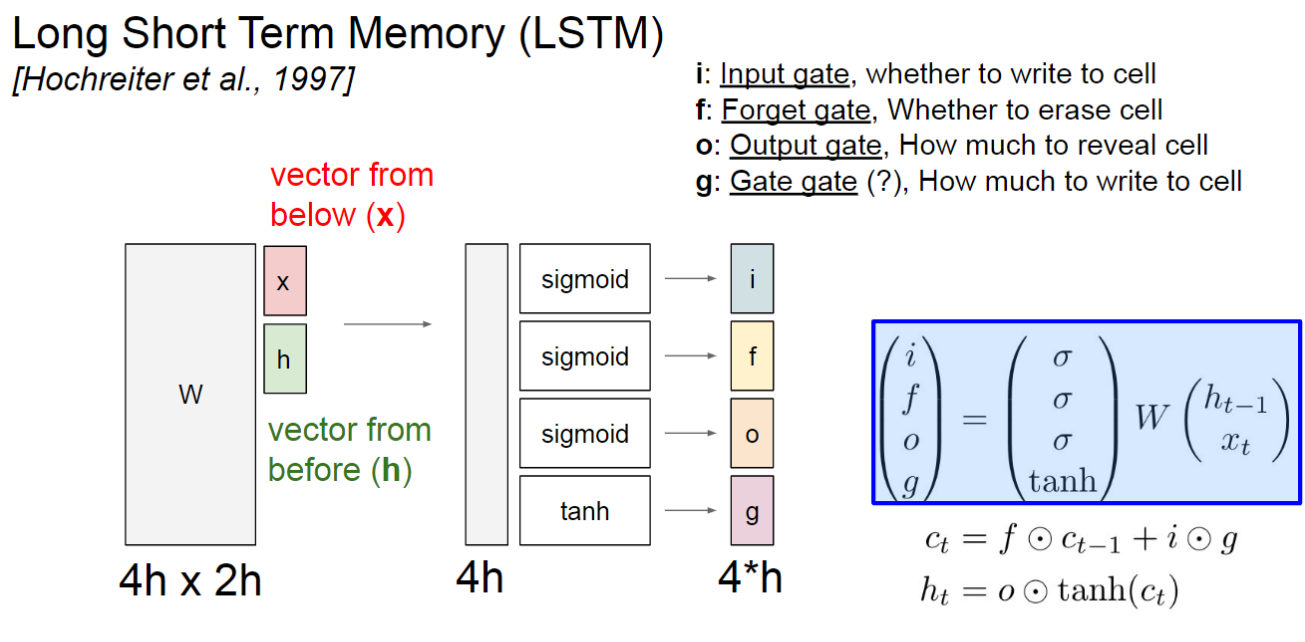
在LSTM中,维护了两个State,\(c_t\)和\(h_t\)。其中\(c_t\)由遗忘门\(f\)与上一个\(c_{t-1}\)相乘(代表继承上一个Cell的信息并加以一定程度的遗忘),加上输出门\(i\)与Gate Gate \(g\)相乘(Gate Gate代表当前的候选状态,输出门\(i\)控制当前候选状态有多少信息需要保存)。最后,输出门\(o\)控制当前时刻的Cell State \(c_t\)有多少信息需要输出给外部状态\(h_t\)。
三个门的计算方式为:
\[i_t=\sigma(W_ix_t+U_ih_{t-1}+b_i)\]
\[f_t=\sigma(W_fx_t+U_fh_{t-1}+b_f)\]
\[o_t=\sigma(W_ox_t+U_oh_{t-1}+b_o)\]
Methodology
总体框架图如Fig 1所示:
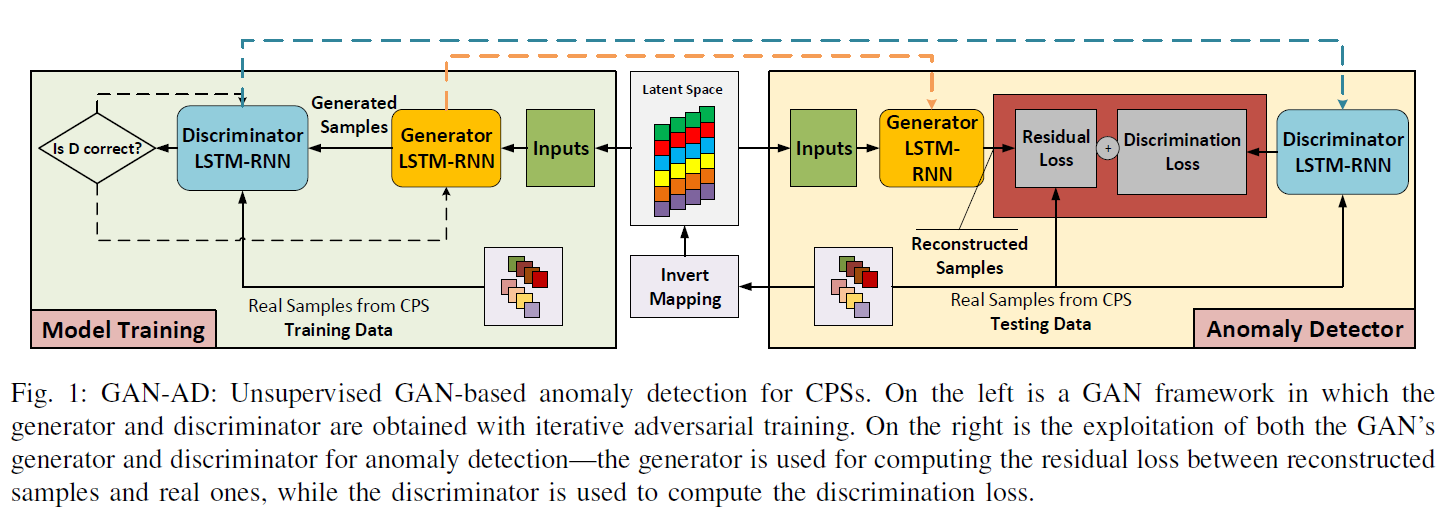
GAN with LSTM-RNN
网络结构上生成器和判别器都是LSTM,优化函数和普通GAN一样:
\[\min\limits_G\max\limits_D V(D,G)=\mathbb{E}_{x\sim p_{data}(x)}[\log D(x)]+\mathbb{E}_{z\sim p_z(z)}[\log (1-D(G(z)))]\]
GAN-based Anomaly Score
在测试阶段,需要使用梯度优化寻找一个使得\(G_{rnn}(z)\)最接近\(X^{test}\)的\(z^k\):
\[\min\limits_{Z^k}Error(X^{test},G_{rnn}(Z^k))=1-Similarity(X^{test},G_{rnn}(Z^k))\]
本文定义了两种Anomaly Score,一种是Residual Loss:
\[Res(X^{test}_t)=\sum\limits_{i=1}^n|x^{test,i}_t-G_{rnn}(Z^{k,i}_t)|\]
一种是Discrimination Loss,即判别器的输出\(D_{rnn}(x_t^{test})\)。
总的Anomaly Score:
\[S^{test}_t=\lambda Res(X^{test}_t)+(1-\lambda)D_{rnn}(x^{test}_t)\]
Anomaly Detection Framework
模型的算法流程如下:
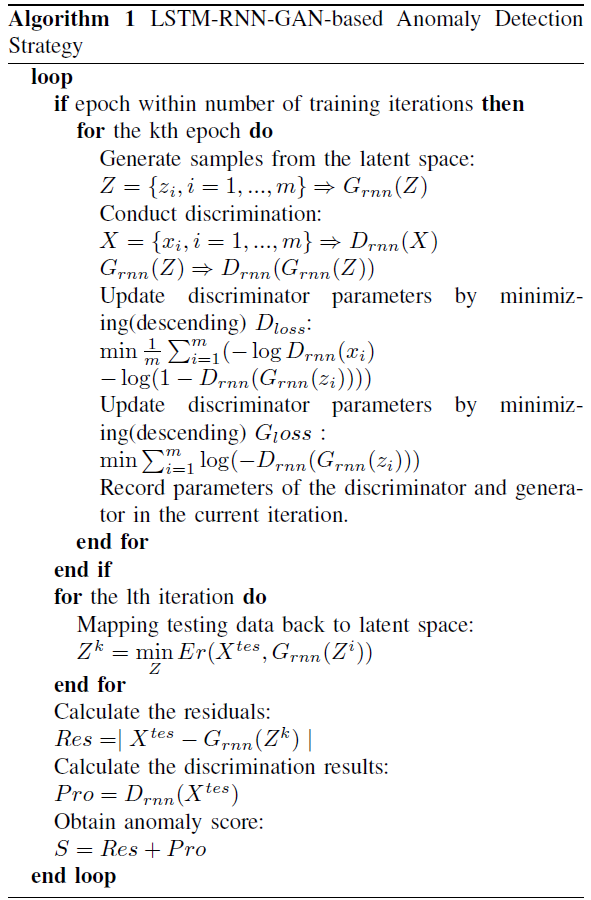
由于本文是多变量时间序列预测,而且时间序列的长度有可能比较长,作者使用了滑动窗口和PCA来进行预处理。
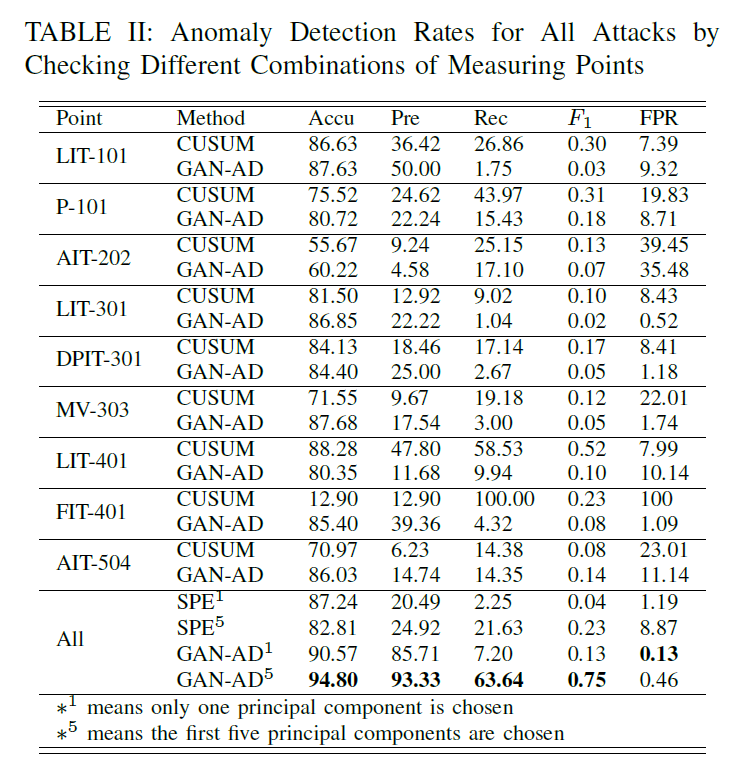
Experiments
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!